
By Simon Fletcher
It’s said that imitation is the sincerest form of flattery. For those of you that read Model of the Month regularly, you’ll appreciate that there is often some form of inspiration contained in other contributors’ articles. In this case I have to credit/blame David Jackson for putting the thought in my head of making an Ape rail scooter. Bad man! I’ve always though Ape’s were kinda silly and kinda cute and truth be told, I’d have loved to own the real thing. So it’s not entirely David’s fault as I’m predisposed towards these odd little Italian vehicles.

As with most bits of inspiration, you don’t always do what others have already done, because often your sources of bits differ from someone else’s, so what follows is another way ‘to skin this cat’ as it were. Having already built an IP Engineering Lister RT, I thought that the chassis would (with some mods) fit neatly under the rear load bed to give my version ‘rear wheel drive’ as opposed to David’s ‘front wheel drive’… not that it would make a difference. I’d also been playing with a LocoRemote controller on another build and thought the controller and battery would fit nicely within the rear load bed. So I had a bit of a mental plan.
Whilst thinking on this plan, my mind drifted back to David’s Ape and his flashing lights. Wouldn’t it be neat if I could make the Ape’s indicators flash as warning lights?… So I set about cruising t’internet for a flasher unit. No joy… other than an illuminated lanyard I could butcher off eBay. Flashing LED’s are available, but wouldn’t look right as they wouldn’t be synchronized. This idea was starting to look a bit like a brainwave too far, until I thought I’d ask Chris at LocoRemote if a synchronised flash was possible on his “Mini with Lights”. Imagine my delight when Chris replied saying that it might be possible… he’d let me know.
So whilst the plan looked like being possible, I ordered an Ape from Germany via eBay. I had 1200mAh LiPo’s spare from my other build, so batteries weren’t an issue. I also ordered some SMT (Surface Mount Technology) LED’s from another eBay supplier in red, orange and white (the red being for a lamp conversion). Meanwhile Chris got back to me with the news that, with some reprogramming, all was good: he even posted a video on YouTube to demonstrate. So I ordered what Chris subsequently christened “Mini Flash”. I also got on to IP Engineering to see if I could get hold of a Lister chassis as they weren’t listed on the website. IP told me that they were re-designing the chassis for the Lister (hence why not on the website), but as luck would have it they had an old stock chassis that they’d be happy to let me have at a reasonable cost. It looks like the planets were aligning for this madness!

Meanwhile, the Ape arrived in gleaming white and I got on with taking it to bits! David’s article shows one in its dismantled state. When the chassis arrived from IP I figured it would, in a cut-down state, just fit under the load bed without pushing the axle back very much. Now to a bit of real engineering; the Ape’s structure is reliant upon a central spine casting, which had to be cut in half to allow the motor/ chassis to sit centrally under the load bed. After loads of head scratching, the plan was to rivet a plate across the end of the cut-down chassis and to drill and tap the remaining bit of spine to this plate. All a bit fiddly with much measuring and a fair bit of filing. The photos show this better than I can describe it. Some bits needed cutting off flush with the load bed base (the axle pedestals, for example), whilst other now redundant locating pins were used to locate the chassis. Eventually, the chassis would be secured to the bed with two M2 screws.
Oh, I forgot to mention, part of ‘the look’ I was after was to use small ‘trolley’ wheels, rather than the larger ones that came with the IP chassis. A quick raid on Slater’s website turned up some 16mm scale 1’ Hudson wheels. There were 1’ curly spokes, but in my head, they seemed a bit over-designed (silly) on a relatively modern vehicle.

Whilst I was chopping up the IP chassis, I made a couple of brass bearings for the driven wheels and drilled out the chassis to take them. The drive shaft was 1/8” in diameter and the Slaters wheels were 3mm bore (you get the wheels off the Slaters axle by twisting them carefully), so they needed easing out with a 1/8” drill: very slowly, so that the bores don’t end up over size. I did realise that the shaft worm gear was awfully close to the wheel rim diameter – oh well, if it bobbles a bit over points, I can live with that (‘cos I don’t have a ‘proper’ track with points!). I’d decided at this point that I would re-use the engine mouldings, simply because it looked a bit bare under the back without some undercarriage gubbins. This meant cutting off the diff and some serious Dremel action on the remainder to clear the motor worm and shaft wheel. Fiddly, but worth it.
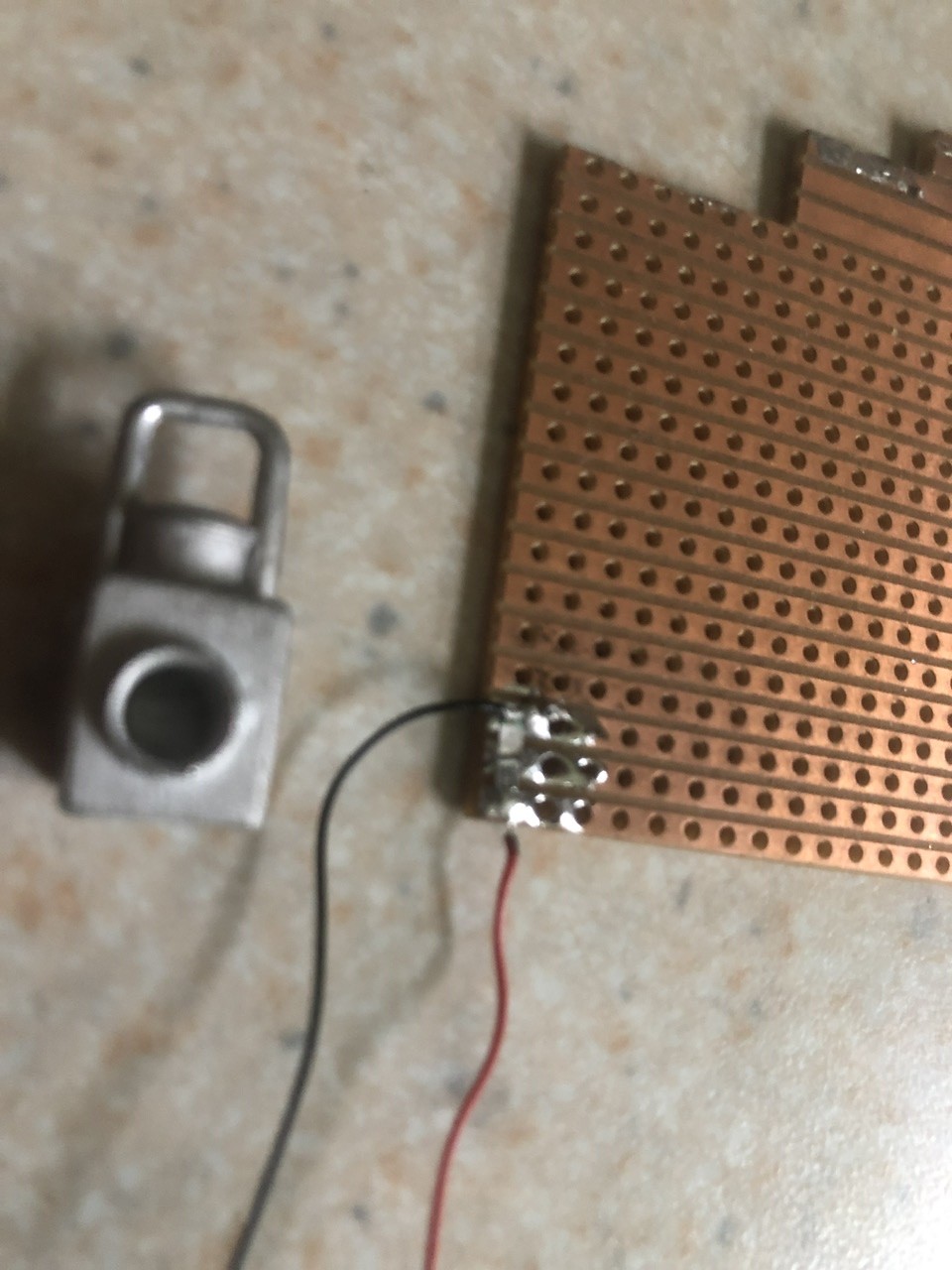
At this point, the cab has been on and off the modified spine a number of times, but now it was time to get stuck into the lighting. As I’m a coward and a cheat, I thought I’d start with the rear indicators first, which means how on earth do I solder surface mount (SMT) stuff? A chat with someone at work who does this stuff (for fun?) suggested tinning some Veroboard tracks, placing the SMT part across the tracks, holding down with fingernail and then melting the tinning with a very fine soldering iron point. Once the SMT bit is stuck, you can then solder the other track connection. It’s worth pointing out that the LEDs I’m using are 0805 size, which is 2 point something millimeters by 1.25mm. In my world, that is TINY! Plus, I need some resistors so that the LocoRemote 3.3v output doesn’t blow the orange LEDs. I used 220R (‘leccy speak for Ohm) SMT resistors. In hindsight I could have used 100R and had brighter indicators, but they are OK on 220R. Once you’ve soldered onto the Veroboard, you can cut out the board to be as small as possible, then fit (very fine) wires, remembering that LEDs are polarity sensitive. You can check during the process that the LEDs are ok by using a diode test on a multimeter, which should (dimly) illuminate them. Do not fit to the model without checking them first! I used some enamelled copper wire, super-glued to the rear of the plastic bar between the rear lights to cross the vehicle; this stiffened up the rear bar nicely. Then the Veroboards can be positioned such that the LEDs are directly behind the lens stub (these stubs are melted to hold the lenses in place in manufacturing, I filed them flush and super-glued the stubs in place).
That’s the easy bit: doing the front lights was extremely hard. I had to remove the front grille/ lamp carrier, make all sorts of Veroboards, line each one up with some carefully Dremelled ‘stubs’ and use styrene sheet to hold in place (the grille moulding is curved) with the ubiquitous super-glue. Some of the cab alloy casting needed careful easing with the Dremel to allow it all to fit in place. Two sentences understates the amount of work and cursing involved, not to mention cyanoacrylic-encrusted fingers! You might have worked out that four lights equals 8 wires, so I had to work out a route through for this bird’s nest to the underside of the cab, then ‘twin-up’ the indicator and headlight wires… now only four to route. See photo. I stuck some pre-shrunk heatshrink sleeving under the cab for wire ducting, super glued in place (heatshrink sleeving surface texture changes after shrinking making the surface more ‘grippy’ if you are planning on glueing it afterwards).

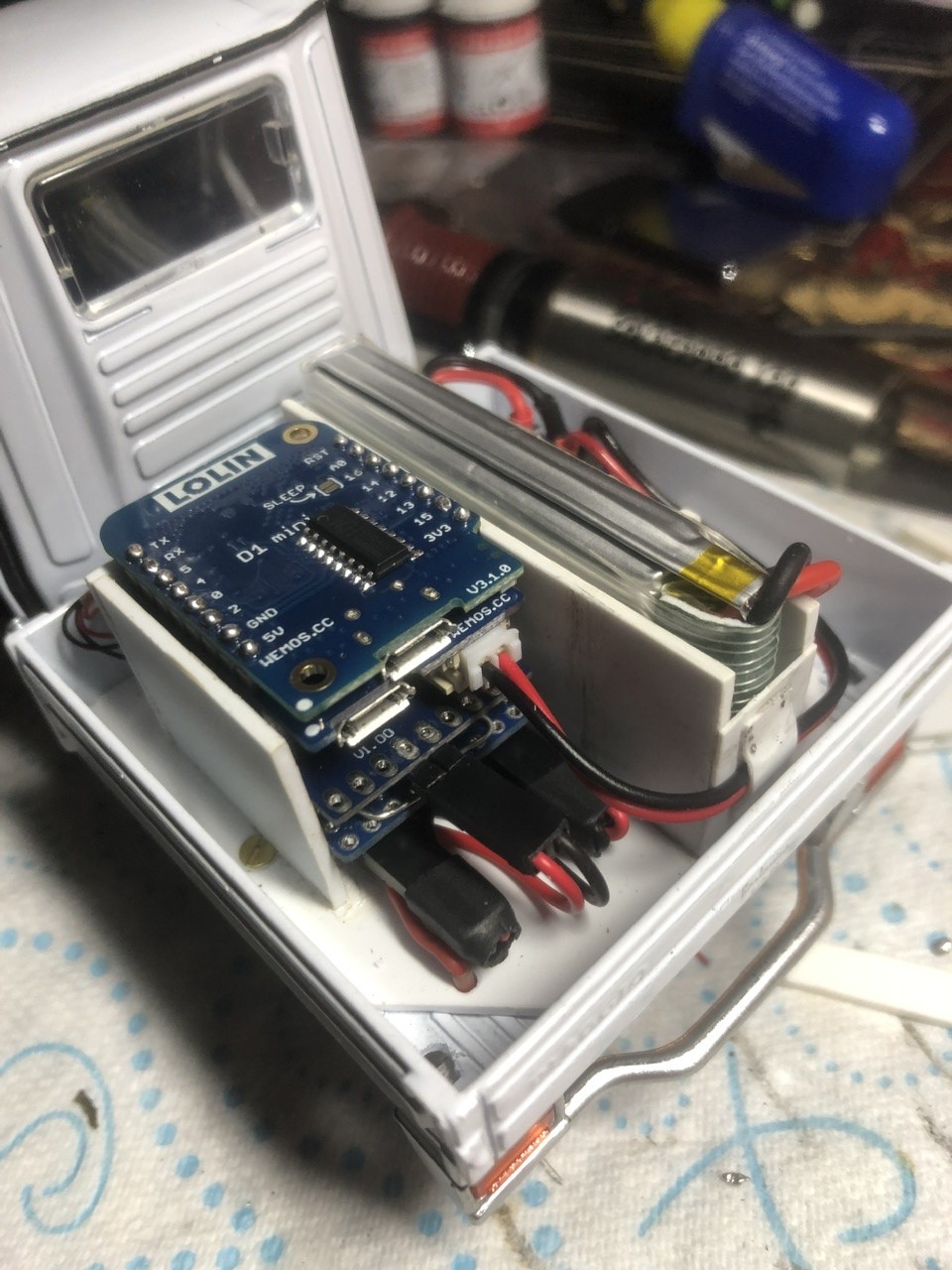
Back in the load bed, some planning for the location of the battery, LocoRemote controller, power switch, various light wire and motor power cable holes was needed. Once a plan was sorted, it was time to make a ‘load bed liner’ from styrene sheet. Other bits of styrene were used to make a battery holder and a retainer for the LocoRemote controller. The photos will give you the general idea. Worth noting that, where any wire goes through the metal load bed, you must use some shrink sleeving to protect the wires from chafing. Deburring the holes after drilling is also a great idea. I can’t tell you just how fiddly the wire soldering was… but I’m sure you can guess!

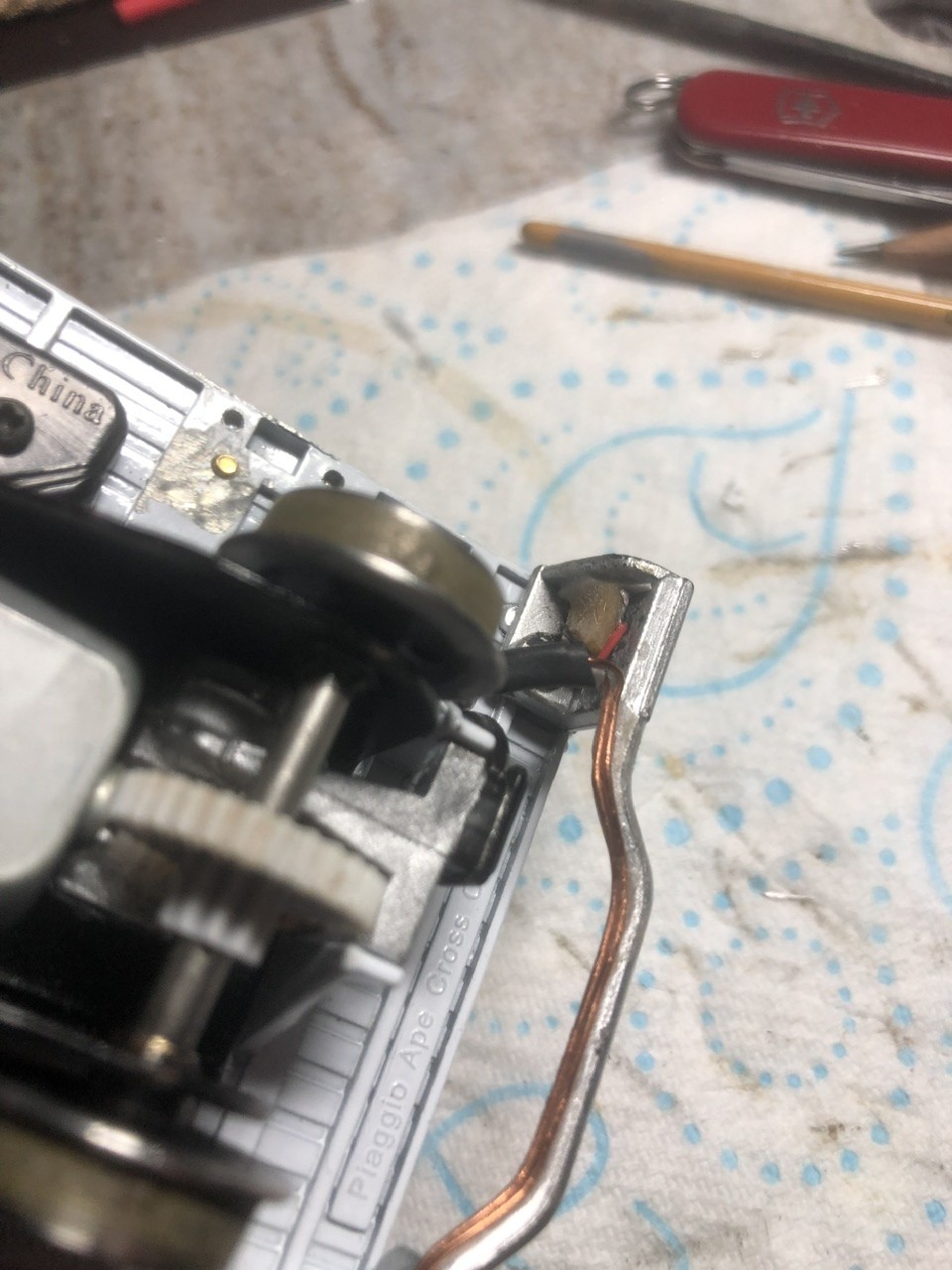
The most involved bit of metalwork in the whole project was the front wheels. For those that don’t know, Apes are three-wheelers. I cut off the steering column just above the wheel so that the handlebars could be retained in the cab. What’s left is a void under the cab where the third wheel was. I’d decided to fit a front assembly with some ‘compensation’ (side to side wobble-ability for the newcomers to railways). You don’t have to, but I’d decided to do this. It’s best to look the pictures for the resulting structure. I drilled, turned, milled and soldered to get this end result. The trickiest bit was the milling to avoid the wheel mudguard and front ‘crash bar’. I won’t lie: I guessed the angles and dimensions… but it worked out.

Now that could’ve/ should’ve been it, but a few test runs uncovered some niggles. As originally designed, the LocoRemote was snuggled up against the battery with the antenna vertically orientated. This caused a few WiFi dropouts. Many mails between myself and the ever-helpful Chris followed, resulting in me changing the orientation of the controller to improve the WiFi signal. With a fair bit of experimentation, I’d come to the conclusion that the alloy load bed and battery were giving the controller WiFi something of a problem, so re-orientating the controller such that the antenna was as clear as it could be of the battery and the load bed. Problem resolved. Massive thanks to Chris for engaging to help sort this out; it was a new problem to him too.
Finally, to disguise the electronic gizmos in the load bed. This involved making a styrene framework over the battery, wires and controller (see photo). Then to cover with a tarpaulin. Tarps are easy to make: I use Tamiya matt acrylic to soak a section of (non-patterned) handkerchief. This will need a couple of coats and will likely remain a bit blotchy, but that is the weathered look. I paint the hanky over a well folded kitchen towel… you will get a lot of soak-through, so please don’t do on your finest wood surface! Hang the hanky up to dry between coats, unless you want the kitchen towel to be stuck to the fabric! The tarp was then stuck to the framework using Formula 500 canopy glue, in stages. You will struggle to do this all in one, including all the inevitable folding, so don’t try!

And that’s about it. I did put some “conspicuity tape” along the sides. This was a piece of 50mm wide tape cut into a 3mm strip. It’s a bit thick, but it is the real deal. You could just use 3mm yellow pinstripe tape, which is less thick. I know this is a long article, but I like to give you a good read. I’ll be taking the Ape to Peterborough and leaving it with Chris on the LocoRemote stand for the day (it’s the least I can do for all the work/ help Chris put in to this project), so you may even catch it running, flashing lights and all! I just need to get a driver sorted now, which will probably be the ‘Railbus Driver’ from Swift Sixteen.
Suppliers:
- LocoRemote (controller)
- IP Engineering (chassis)
- Slater’s Plastikard (wheels)
Plus various eBay suppliers and the darkest depths of my garage for brass bits and pieces.
Plagiarist!! But I’m pleased my original model inspired your adaptations. I do find the front wheel drive looses traction if I try to pull anything like a loaded wagon. And my driver is a Swift Sixteen kit but cut and filed to fit